




Fieldbus Closed Loop Stepper Drive ECT42/ ECT60/ECT86


Product Introduction



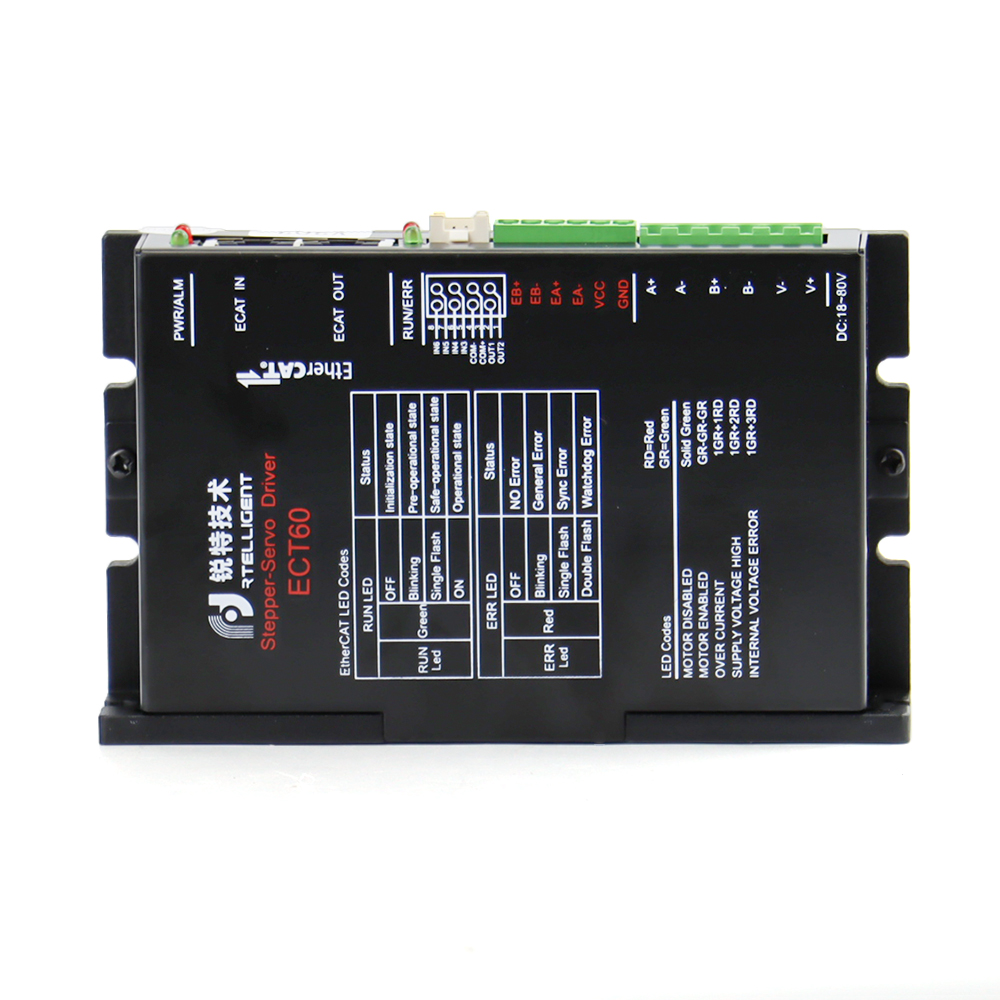
Connection

Features
• Support CoE (CANopen over EtherCAT), meet CiA 402 standards
• Support CSP, PP, PV, Homing mode
• The minimum synchronization period is 500us
• Dual port RJ45 connector for EtherCAT communication
• Control methods: open loop control, closed loop control / FOC control (ECT series support)
• Motor type: two phase, three phase;
• Digital IO port:
4 channels optically isolated digital signal inputs: IN 1、IN 2 is encoder input; IN 3~IN 6 is 24V single-ended input, common anode connection method;
2 channels optically isolated digital signal outputs, maximum tolerance voltage 30V, maximum pouring or pulling current 100mA, common cathode connection method.
Electrical Characteristics
|
Product model |
ECT42 |
ECT60 |
ECT86 |
|
Output current (A) |
0.1~2A |
0.5~6A |
0.5~7A |
|
Default current (mA) |
450 |
3000 |
6000 |
|
Power supply voltage |
24~80VDC |
24~80VDC |
24~100VDC / 24~80VAC |
|
Matched motor |
Below 42 base |
Below 60 base |
Below 86 base |
|
Encoder interface |
Incremental orthogonal encoder |
||
|
Encoder resolution |
1000~65535 pulse/turn |
||
|
Optical isolation input |
4 channels of common anode 24V input |
||
|
Optical isolation output |
2 channels: alarm, brake, in place and general output |
||
|
Communication interface |
Dual RJ45, with communication LED indication |
||
-
 Rtelligent ECT Series User Manual
Rtelligent ECT Series User Manual


